+7(499)142-62-81
WasteShark – робот, который очищает от мусора морскую воду
15.09.2018

В настоящее время в мировом океане плавает очень большое количество пластика и другого мусора. Большая часть этого мусора попадает на океанские просторы из некоторых мест береговой линии и для борьбы с этим явлением компания RanMarine разработала и изготовила плавающего робота под названием WasteShark. Этот робот, плавая в районах портов и в других местах, собирает и "поглощает" мусор, прежде чем он попадет на простор океана и будет плавать, пока не прибьется к одному из мусорных "островов".
Робот WasteShark имеет форму небольшого катамарана с электрическим приводом. Между понтонами катамарана расположен совок, "рот", которым робот собирает плавающий мусор и который затем попадает во внутренний бункер.

В настоящее время компания RanMarine принимает участие в голландской государственной программе, связанной с разработкой новых технологий, имеющих отношение к океану и морскому транспорту. А первые опытные образцы таких роботов-уборщиков, получившие "имена" Fatboy и Slim, уже работают в акватории порта Роттердама. В течение нескольких месяцев к ним присоединится еще два робота, который, по всей вероятности, получат в порту "постоянное место работы".

Конечной целью компании RanMarine является разработка большого варианта робота WasteShark, который получит название Great Waste Shark. Этот робот, действующий при помощи энергии солнечных лучей, сможет собирать до 500 килограмм мусора за один выход в море. Масса всевозможных датчиков позволит ему избегать столкновения с морскими судами и другими плавающими средствами. А технологии навигации не позволят роботу заходить в места с наиболее оживленным морским движением.
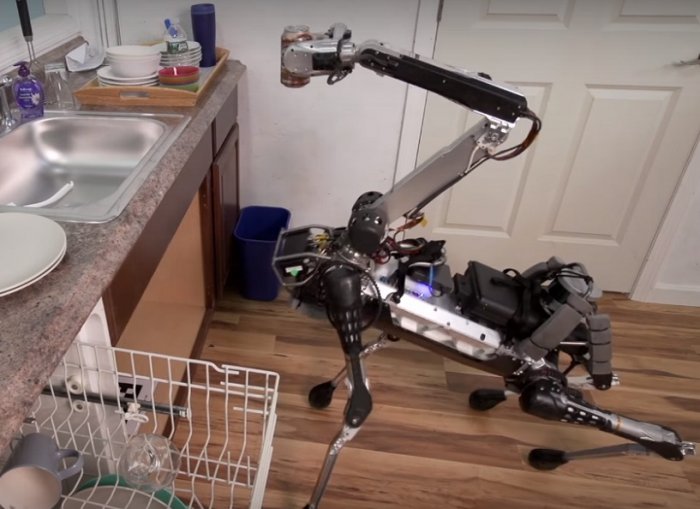
Робот SpotMini – четвероногий домашний помощник
15.09.2018
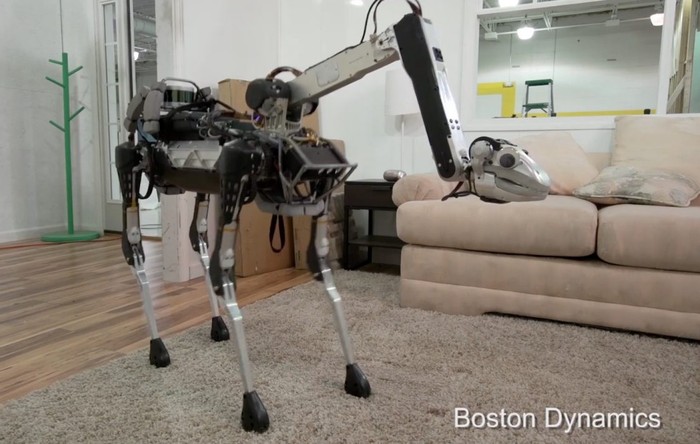
Известная компания Boston Dynamics, разрабатывающая роботов военного назначения (см. заметку "WildCat - автономный четвероногий робот-спринтер"), представила на этой неделе своего нового робота SpotMini с абсолютно миролюбивой концепцией - домашнего помощника. Внешне он похож на предыдущие проекты производителя, но в отличии от них, конструкция робота SpotMini абсолютно лишена гидравлических элементов, его полностью электрическая система делает его самым тихим роботом, изготовленным компанией за все время. К тому же инженеры снабдили его складным манипулятором, с помощью которого SpotMini может выполнять ряд действий, таких как загрузить лоток посудомоечной машины тарелками и чашками, выбросить мусор, подать человеку стакан или банку с напитком и даже помочь себе подняться в случае неудачного падения.
Вес робота SpotMini составляет 25 килограмм или 29 килограмм вместе с "рукой". Одного заряда аккумуляторных батарей роботу хватает на 90 минут непрерывного функционирования. За восприятие окружающей среды отвечают ряд стереоскопических камер, которые помимо изображения позволяют получить глубину, расстояние от камеры до какого-либо объекта на изображении. А твердотельные гироскопы и масса других датчиков позволяют роботу знать в каждый момент времени положение его тела и положение каждой из его конечностей.
Видео к заметке:
NASA готовит роботов к путешествию на Марс
15.09.2018

Совместно с Космическим центром Хьюстон и NineSigma NASA открыло регистрацию на новый конкурс — Space Robotic Challenge. Это мероприятие направлено на поиск возможностей разработки андроидов, которые помогут космонавтам в путешествии на Марс. Space Robotics Challenge представляет собой конкурс с призом в 1 миллион долларов, который должен расширить пределы гибкости роботов. Команды будут должны запрограммировать виртуального робота, смоделированного на основе робота NASA Robonaut 5 (R5), и выполнить серию задач на симуляторе, включающем задержку связи.
На Земле роботизированные системы достигли особой гибкости, благодаря применению гидравлики, однако в космосе их использовать нельзя из-за температур ниже точки замерзания и жестоких условий на поверхности планет. R5 использует эластичные технологии вместо гидравлики — новаторский подход, который должен решить проблемы работы в космосе. Эти технологии также могут пригодиться людям и на Земле, поскольку могут функционировать в опасных или чрезвычайных условиях нашей родной планеты.
«Точных и ловких роботов, способных работать с задержкой связи, можно использовать в ходе космических полетов и наземных экспедиций на Марс и в другие места для решения сложных и опасных задач, которые будут иметь решающее значение для поддержки наших астронавтов, — говорит Монси Роман, руководитель программы NASA Centennial Challenges. — NASA и наши партнеры уверены, что общественность ответит на этот вызов и сможет показать инновационные технологии».
Конкурс будет проходить в виртуальной среде. Каждая команда R5 должна будет разрешить последствия пыльной бури, которая повредила марсианскую среду обитания. Задачи будет три: настроить тарелку связи, починить солнечный массив и устранить утечку в жилище.
Регистрация для участия в конкурсе началась на этой неделе, отборочный тур будет проходить с середины сентября до середины ноября. Финалисты этого тура будут объявлены в декабре и поучаствуют в открытой практике с января до середины июня 2017 года. Окончательный виртуальный конкурс пройдет в июне 2017 года, а победители станут известны к концу июня.
Программное обеспечение, разработанное в рамках соревнования, будет распространяться и на другие робототехнические системы, что позволит задействовать его и в более старых моделях роботов вроде Robonaut 2, а также в будущих моделях.
Благодаря технологиям, которые будут разработаны в рамках конкурса, роботы смогут поучаствовать в предварительных миссиях на выбранных участках для приземления, прибыв задолго до астронавтов и настроив среду обитания, системы жизнеобеспечения, связи, солнечных батарей и даже проведя первые научные исследования.
NASA решило продать одного из своих старых роботов-испытателей
15.09.2018
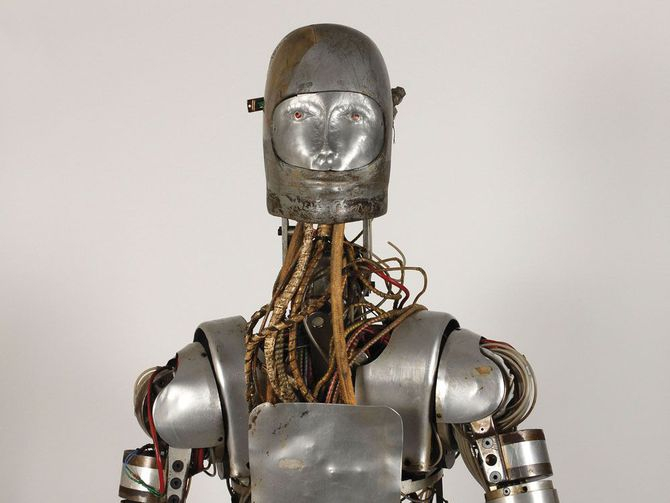
Аэрокосмическое агентство NASA уже давно использует роботов для испытаний новых космических скафандров. Одного из самых старых решено было выставить в качестве лота будущего аукциона Remarkable Rarities Auction. Робот Power-Driven Articulated Dummy был разработан для специально для NASA между 1963 и 1965 годами и использовался для проверки новых скафандров.
С помощью этого робота испытывались такие показатели, как
прочность, эластичность, а также устойчивость скафандров к различных внешним
опасным материалам. Высота робота аналогична росту среднестатистического
человека. В его соединительных частях используются гидравлические системы.
Всего было создано два таких робота. Один из них сейчас находится в музее
Смитсоновского института. Второй, поврежденный в рамках испытаний гораздо
сильнее, собираются продать на аукционе. Организаторы аукциона надеются выручить за этот исторический «артефакт»
более 80 000 долларов.
Аукцион стартует 15-го и продлится до 26 сентября. Ниже можно посмотреть видеодемонстрацию:
Робот Atlas научился балансировать на одной ноге
15.09.2018

Роботы-гуманоиды доставляют немало головной боли современным разработчикам. Особенно сложно научить двуногие механизмы удерживать равновесие и не падать во время выполнения различных движений. Для этого применяются массивы датчиков, включая акселерометры и гироскопы, сложнейшие алгоритмы и многое другое. Знаменитый робот Atlas, созданный в стенах компании Boston Dynamics не только умеет неплохо ходить на двух ногах, но теперь ещё и научился балансировать на одной ноге, что раньше не удавалось никому.
При этом робот даже не стоит на полной стопе, а опирается на
тоненькую доску под одной из его ног (толщина доски около 2 сантиметров). Чтобы
усложнить задачу, инженеры отдают роботу команду о совершении наклонов из
стороны в сторону. Он послушно балансирует на своей хрупкой опоре, но как
только амплитуда наклонов увеличивается до недопустимого уровня, Atlas всё-таки
теряет равновесие. Впрочем, в такой ситуации не устоял бы и достаточно ловкий
человек с отличной координацией и чувством равновесия.
Алгоритм для удерживания равновесия был разработан специалистами института IHMC, занимающегося решением проблемами в области искусственного интеллекта, а также в отношениях между человеком и машинами. Пока ещё Atlas справляется далеко не идеально и нам продемонстрировали один из по-настоящему удачных дублей, снятых в ходе тестирования технологии. Но специалисты из Boston Dynamics продолжают работать над решением множества мелких проблем, и вполне может статься, что в будущем робот сможет дать фору многим цирковым эквилибристам.
Четырехногий робот от «Ghost Robotics» покоряет лестницы, двери, заборы и другие препятствия
15.09.2018

Передвижение на четырех и двух ногах было постоянной проблемой для роботов. В этом вопросе произошел сильный прогресс за последние несколько лет, особенно когда речь идет о динамических движениях: не просто ходить без падений, но и забираться, бегать, прыгать и многое другое. Это и есть истинная ценность ног: они позволяют роботам иметь дело с такими препятствиями и рельефом, где колеса и гусеницы бесполезны.
Получение таких четвероногих роботов, способных делать такие полезные и веселые вещи подразумевает, что а) вы знаете что делаете, б) у вас есть робот, который может сделать то что вы хотите. К сожалению, создание робота с четырьмя ногами сложно, дорого и отнимает много времени. Существует небольшая горстка исследовательских разработок четвероногих роботов, некоторые из которых действительно удачны, но для многих из нас необходимость разбираться с аппаратной частью является основным препятствием, что не позволяет сосредоточиться на программном обеспечении, необходимого для решения прикладных задач
В лаборатории профессора Дэна Кодишика в Университете штата
Пенсильвания, Авик Де и Гэвин Кеннеолли проделали много работы по созданию
своего собственного четвероногого робота, который называется
Minitaur. Это небольшая, но очень
способная платформа, которая использует инновационные прямоприводные электродвигатели
для повышенной мощности, виртуального соответствия и комплексного зондирования.
Чтобы понять, почему существует достаточный спрос на небольшие четвероногие платформы, такие, как Minitaur, достаточно просто посмотреть это видео: